您现在的位置是: 首页 > 数码产品 数码产品
堆栈式_堆栈式CMOS传感器
zmhk 2024-05-27 人已围观
简介堆栈式_堆栈式CMOS传感器 我非常愿意为大家解答关于堆栈式的问题。这个问题集合包含了一些复杂而有趣的问题,我将尽力给出简明扼要的答案,并提供进一步
我非常愿意为大家解答关于堆栈式的问题。这个问题集合包含了一些复杂而有趣的问题,我将尽力给出简明扼要的答案,并提供进一步的阅读材料供大家深入研究。
1.堆栈和队列 的本质区别
2.堆栈式CMOS什么意思?和背照式CMOS有何区别
3.什么是堆栈式镜头?蔡司又是什么东东?
4.队列和堆栈的区别
堆栈和队列 的本质区别
队列和栈是两种不同的数据结构。它们有以下本质区别:1、操作的名称不同。
队列的插入称为入队,队列的删除称为出队。栈的插入称为进栈,栈的删除称为出栈。
2、操作的限定不同。
队列是在队尾入队,队头出队,即两边都可操作。而栈的进栈和出栈都是在栈顶进行的,无法对栈底直接进行操作。
3、操作的规则不同。
队列是先进先出(FIFO),即队列的修改是依先进先出的原则进行的。新来的成员总是加入队尾(不能从中间插入),每次离开的成员总是队列头上(不允许中途离队)。
而栈为后进先出(LIFO),即每次删除(出栈)的总是当前栈中最新的元素,即最后插入(进栈)的元素,而最先插入的被放在栈的底部,要到最后才能删除。
4、遍历数据速度不同。
队列是基于地址指针进行遍历,而且可以从头部或者尾部进行遍历,但不能同时遍历,无需开辟空间,因为在遍历的过程中不影响数据结构,所以遍历速度要快。
栈是只能从顶部取数据,也就是说最先进入栈底的,需要遍历整个栈才能取出来,而且在遍历数据的同时需要为数据开辟临时空间,保持数据在遍历前的一致性。
扩展资料:
1、堆栈的储存方式:
堆栈是一个特定的存储区或寄存器,它的一端是固定的,另一端是浮动的?[1]。对这个存储区存入的数据,是一种特殊的数据结构。
所有的数据存入或取出,只能在浮动的一端(称栈顶)进行,严格按照“先进后出”的原则存取,位于其中间的元素,必须在其栈上部(后进栈者)诸元素逐个移出后才能取出。
在内存储器(随机存储器)中开辟一个区域作为堆栈,叫软件堆栈;用寄存器构成的堆栈,叫硬件堆栈。
单片机应用中,堆栈是个特殊存储区,堆栈属于RAM空间的一部分,堆栈用于函数调用、中断切换时保存和恢复现场数据。
堆栈中的物体具有一个特性:第一个放入堆栈中的物体总是被最后拿出来, 这个特性通常称为先进后出 (FILO—First-In/Last-Out)。?
堆栈中定义了一些操作, 两个最重要的是PUSH和POP。 PUSH(入栈)操作:堆栈指针(SP)加1,然后在堆栈的顶部加入一 个元素。
POP(出栈)操作相反,出栈则先将SP所指示的内部ram单元中内容送入直接地址寻址的单元中(目的位置),然后再将堆栈指针(SP)减1。这两种操作实现了数据项的插入和删除。
2、队列的储存方式:
队列是一种特殊的线性表,特殊之处在于它只允许在表的前端(front)进行删除操作,而在表的后端(rear)进行插入操作,和栈一样,队列是一种操作受限制的线性表。
进行插入操作的端称为队尾,进行删除操作的端称为队头。队列中没有元素时,称为空队列。
队列的数据元素又称为队列元素。在队列中插入一个队列元素称为入队,从队列中删除一个队列元素称为出队。
因为队列只允许在一端插入,在另一端删除,所以只有最早进入队列的元素才能最先从队列中删除,故队列又称为先进先出(FIFO—first in first out)线性表。
百度百科—堆栈
百度百科—队列
堆栈式CMOS什么意思?和背照式CMOS有何区别
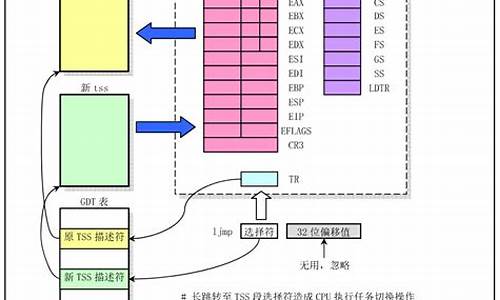
堆栈式cmos使用有信号处理电路的芯片替代了原来背照CMOS图像传感器的支持基板,在芯片上重叠形成背照CMOS元件的像素部分,从而实现了在较小的芯片尺寸上形成大量像素点的工艺。由于像素部分和电路部分分别独立,因此像素部分可针对高画质优化,电路部分可针对高性能优化。背照式结构、层积式结构都是为了提高芯片的空间利用率,从平面排布升级到立体堆叠。在这一过程中,不同功能的元件实现了层级独立,制造商可以根据需要应用不同的制造工艺——将尖端制造技术应用在刀刃上,同时控制整体制造成本。
普通CMOS和堆栈式cmos对比图
什么是堆栈式镜头?蔡司又是什么东东?
而索尼自家生产的背照式CMOS就命名为Exmor R CMOS,这个命名主要是为了提升索尼产品的竞争力。可以说目前的主流产品都是采用本款产品,包括iphone5、三星GalaxyS 3、Note2以及LT26ii。虽然之前iphone 4是由OmniVision提供的,但是到了iphone4s就果断换为索尼供货了,而这也是从客观层面上,反应出索尼摄像头的先进性。
那么为何索尼的背照式CMOS镜头如何优异呢?这个还是要归功于前面提到的工艺问题,由于SOI晶圆有利于研磨打薄,越薄就越易于采光,采光能力出色,就可以得到更好的成像效果。其他厂商,如三星、OmniVision等,大部分使用的是普通硅晶圆(体硅晶圆)。厚度上,SOI晶圆可以做到体硅晶圆的1/30左右,成像效果优势可想而知。但是它的成本也要高出3-4倍,总体下来,索尼背照式CMOS的价格也并不低。
堆栈式CMOS(exmor RS CMOS)
而为了提高索尼自家产品的认知度,其也是为自家的背照式CMOS镜头起了名字,名字就是Exmor R CMOS,而这样的镜头在lt26i的发布上也是进行重点介绍。可以说索尼的exmor R CMOS奠基了良好的口碑,所以索尼也在谋划生产新一代的产品。而这个就是我们今天要重点介绍的堆栈式CMOS镜头,其英文学名为exmor RS CMOS,可以看到相比起来多了一个S(stack),也就是stacked CMOS,当然你也可以把他理解为积层式CMOS镜头。
所以根据产品的特性来说,可以将堆栈式CMOS传感器看做背照式CMOS传感器的衍生产品。全新的传感器将之前的电路组件放置在了感光组件下方,直观的优点就是为设备内提供了更多的空间。从而在性能上得到提升的同时,也更加的微小化。所以堆栈式CMOS虽然来源于背照式CMOS,但是却高于背照式CMOS.
而由于目前只有索尼能生产堆栈式CMOS镜头,虽然索尼的下一代旗舰yuga将采用堆栈式CMOS镜头,但是由于该机型目前还没有发布,所以oppo find 5也是顺理成章的成为了全球第一款采用堆栈式CMOS镜头的机型。所以这一技术在手机镜头领域是拥有划时代意义的。
队列和堆栈的区别
堆栈式镜头正确说应该是堆栈式CMOS传感器(StackedCMOS)ExmorRS,由索尼公司于2012年8月22日正式发布,该类型传感器将主要用于手机和平板电等移动数码设备,ExmorRS堆栈式CMOS传感器由背照式CMOS传感器发展而来,新传感器将原本需紧靠感光组件的电路部份置于感光组件的下方,使得设备内部拥有更多的空间。在实现功能多样化的同时,还做到了小型化。该传感器使用了全新的RGBW色彩编码方式。与传统RGB色彩编码方式不同的是,该传感器内置的W白色像素传感器可以独立处理光亮度信号,在不损伤画质的前提下,扩展感光度范围,提升传感器在低光照条件下的画质表现。
卡尔蔡司是来自德国的品牌,是目前为数不多的非日系光学镜头厂商。卡尔·蔡司是一家历史相当悠久的光学仪器厂商,其出品的镜头在传统相机领域向来都是“高贵”的代名词,卡尔蔡司已有一百多年的历史,生产世界上屈指可数的高品质透镜。以其独有的色彩还原和成像特点令全世界摄影家及爱好者爱不释手(但因其价格高高在上而敬而远之,望而却步)。分辨率高,颜色还原出色,几乎没有四角失真现象。忠实提供高画质摄影。现在卡尔蔡司与索尼合作联合制作索尼A卡口高性能单反镜头,命名为ZA镜头。
首先这个问题是非常具有歧义的。堆栈其实是堆和栈,都是内存的不同区域。那么这里的堆栈,应该不是指内存,而是java.util.Stack(类).应该称之为栈。之所以叫堆栈,应该是某些人的理解问题。这里的队列,应该是java.util.Queue(接口)就是说,java集合中的两种数据结构的对比。 队列是FIFO的队列是FIFO的(先进先出);
堆栈式FILO的堆栈式FILO的(现今后出);
好了,今天关于“堆栈式”的话题就讲到这里了。希望大家能够通过我的介绍对“堆栈式”有更全面、深入的认识,并且能够在今后的实践中更好地运用所学知识。
上一篇:dv4-3125tx